 1.历史
苏联地面部队的SAM防御系统基于多层的组织。前线和步兵部队受2K11 KRUG 中程地空导弹(北约称SA-4 Ganef)的保护。坦克师使用更昂贵的2K12 KUB短程地空导弹(北约称SA-6 Gainful)。摩托化部队则使用廉价的自行两栖短程地空导弹系统ELLIPSE(北约称SA-8 Gecko)。
1.历史
苏联地面部队的SAM防御系统基于多层的组织。前线和步兵部队受2K11 KRUG 中程地空导弹(北约称SA-4 Ganef)的保护。坦克师使用更昂贵的2K12 KUB短程地空导弹(北约称SA-6 Gainful)。摩托化部队则使用廉价的自行两栖短程地空导弹系统ELLIPSE(北约称SA-8 Gecko)。
1959年2月9日,苏联部长会议下令开始研制ELLIPSE系统,要求必须能够在8km的距离上击落高度在50-5000米的超音速(1马赫)物体,并且可以在移动中或者船上发射。研究由NII-20研究所的对小型移动炮兵雷达设计经验丰富的MM Kosichkin带领下进行。
 MM Kosichkin
在1967年的七月,ELLIPSE项目被部长会议驳回了。因为它暴露了如下几个问题:
MM Kosichkin
在1967年的七月,ELLIPSE项目被部长会议驳回了。因为它暴露了如下几个问题:
1.不能进行360°全方位射击。
2.不能有效攻击低于100m的目标。
3.没有能力应付突然出现的目标。
4.车辆的浮力不足。
 早夭的ELLIPSE
在经历ELLIPSE的失败后,MM Kosichkin的位置被V.P.Efremov所替代。他建议删除行进间射击装置,但同时建议保留行进间探测目标的能力,并且建议增加一个导弹通道。
早夭的ELLIPSE
在经历ELLIPSE的失败后,MM Kosichkin的位置被V.P.Efremov所替代。他建议删除行进间射击装置,但同时建议保留行进间探测目标的能力,并且建议增加一个导弹通道。
 V.P.Efremov
在经历了热火朝天的讨论及几次抗议之后,会议期间,炮兵总司令PN Kulesho同意对设计进行更改。原型车(项目 1040)使用一个BAZ-5937的底盘来增加浮力、减轻重量和增大射击方位角。单独的导弹发射器和雷达被重新布置进一个单元。
V.P.Efremov
在经历了热火朝天的讨论及几次抗议之后,会议期间,炮兵总司令PN Kulesho同意对设计进行更改。原型车(项目 1040)使用一个BAZ-5937的底盘来增加浮力、减轻重量和增大射击方位角。单独的导弹发射器和雷达被重新布置进一个单元。
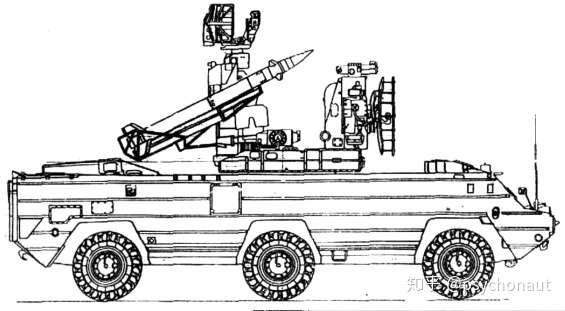 项目 1040
项目 1040
 一体式的导弹发射器以及雷达
在1971年10月4日的成功测试之后, 9K33 OSA(SA-8A Gecko)被调整成拥有可以使用两枚9M33M导弹来攻击一个目标的能力。
一体式的导弹发射器以及雷达
在1971年10月4日的成功测试之后, 9K33 OSA(SA-8A Gecko)被调整成拥有可以使用两枚9M33M导弹来攻击一个目标的能力。
- 目标速度 300m/s (1马赫); 50..5000m 高度, Osa 9km 射程
- 目标速度 420m/s (1.4马赫); 200..5000m 高度, Osa 7km 射程
第一种海军型号由1973年开始服役。
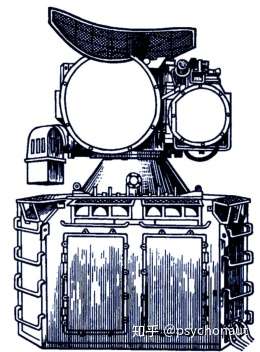 雷 达
雷 达
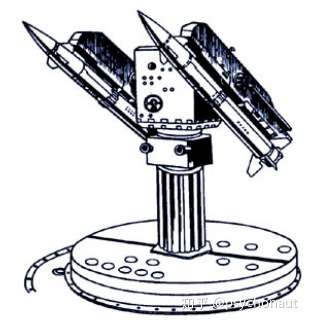 发射器
它保留了分离的雷达以及导弹发射器,单通道以及行进间射击的能力(因为船无时不刻不在运动)。甲板下的可伸缩双装填器ZIF-122可以从四个可旋转的内置弹舱里在16~21秒内完成装填。每个弹舱最多携带五枚导弹。
发射器
它保留了分离的雷达以及导弹发射器,单通道以及行进间射击的能力(因为船无时不刻不在运动)。甲板下的可伸缩双装填器ZIF-122可以从四个可旋转的内置弹舱里在16~21秒内完成装填。每个弹舱最多携带五枚导弹。
舰上版本的导弹系统与陆基OSA有70%的共通性,并且使用完全一样的9M33M导弹。它在各级别船只上广泛安装,包括气垫船、快艇、护卫舰、驱逐舰、巡洋舰甚至是航母。
 就在部署之后,关于OSA的现代化也开始有条不紊的进行。它提出了以下几个要求:
就在部署之后,关于OSA的现代化也开始有条不紊的进行。它提出了以下几个要求:
提高驾驶员的侧面视野
能够击落速度为500m/s(1.6马赫)的目标
能够击落以300m/s(1马赫)撤退的目标
将导弹最大过载提高到25g
接下来我们开始介绍OSA的一个现代化改型OSA-AK的操作。
壁虎的操作系统由以下几个部分组成:
 距离处理器
距离处理器
 角度处理器
角度处理器
 开火中心
开火中心
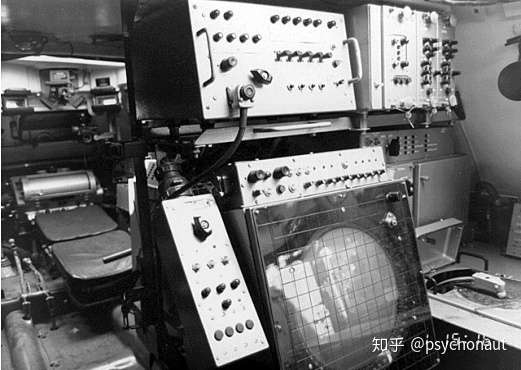 此外,还有P-12 匙架 -A目标指示雷达提供目标指示以及早期预警。图为P-12上的标图版。
壁虎的天线系统是苏联设计的最复杂的机械导向目标和导弹跟踪系统。和V.P. Efremov设计的2K11 KRUG(SA-4)一样,它的导弹塔只能在±330°的角度上旋转。
以下是天线的各组成部分:
此外,还有P-12 匙架 -A目标指示雷达提供目标指示以及早期预警。图为P-12上的标图版。
壁虎的天线系统是苏联设计的最复杂的机械导向目标和导弹跟踪系统。和V.P. Efremov设计的2K11 KRUG(SA-4)一样,它的导弹塔只能在±330°的角度上旋转。
以下是天线的各组成部分:

1.СОЦ,,目标搜索雷达
2.
ССЦ,,锐方向性波束单脉冲导弹/目标追踪雷达
3.
TOB,目标追踪相机
4.通道1/2上的单脉冲中束导弹制导雷达
5.通道1/2上的圆锥扫描宽束导弹制导雷达
6.通道1/2上的宽束导弹询问器
----------------------------------------------------------------------------
。СОЦ 目标搜索雷达
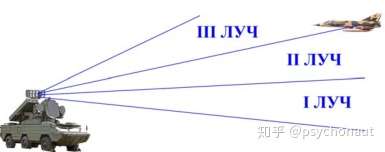 旋转的4cm波长,270kW脉冲多普勒SOC可以形成三束光束(I / II / IIIЛУЧ)。 最大显示范围是45km。
旋转的4cm波长,270kW脉冲多普勒SOC可以形成三束光束(I / II / IIIЛУЧ)。 最大显示范围是45km。
 1/2,ПОИСК ВКЛ/ ВЫКЛ(天线开/关)
1/2,ПОИСК ВКЛ/ ВЫКЛ(天线开/关)
3/4,ВЫСОКОЕ ВКЛ/ ВЫКЛ(发射机开/关)
5, ДАЛЬНОСТЬ(三档显示距离开关(0-15km, 0-35km, 10-45km)
6/7/8. I/II/III ЛУЧ 使用低、中、高 波束扫描
9, I-III ЛУЧ, 依次用所有三个高度波束扫描
10,I-II ЛУЧ, 依次使用两个低波束扫描
11,地面回波
12, СДЦ 运动目标指示器(仅在35km距离内有效)
---------------------------------------------------------------------------------
。СCЦ 目标追踪雷达
 可旋转的(在±330°内)2cm波长,180kw功率的单脉冲多普勒SSC发射锐方向性波束(蓝色)。反射的信号生成三个波束(蓝色、红色、绿色),红色和绿色均为双锥形波束。目标追踪系统寻找红色/绿色信号最小的点以及蓝色信号最大的点。最大显示距离为28km。
可旋转的(在±330°内)2cm波长,180kw功率的单脉冲多普勒SSC发射锐方向性波束(蓝色)。反射的信号生成三个波束(蓝色、红色、绿色),红色和绿色均为双锥形波束。目标追踪系统寻找红色/绿色信号最小的点以及蓝色信号最大的点。最大显示距离为28km。
 1/2. ПЕРЕДАТЧИК ВКЛ/ОТКЛ 发射器开/关
1/2. ПЕРЕДАТЧИК ВКЛ/ОТКЛ 发射器开/关
3. SSC天线当前方向
4. ПОДСВЕТКА 方位指示器的背景照明
5. βс 方位角仪器,以俄制角度读取(60-00为360°)
6. ВЛЕВО ВПРАВО 快速旋转SSC(向左/右)
7. АЗИМУТ 慢速旋转SSC(向左/向右)
8. 射程仪
9. 射程手轮
10. СДЦ, 运动目标指示器
 1. ПОДСВЕТКА,高度指示器的背景照明
1. ПОДСВЕТКА,高度指示器的背景照明
2. 高度指示器,以俄制角度读取(15-00 为 90°)
3. РУ 手动高度模式
4. УГОЛ МЕСТА 如果选择手动高度模式,此时可以向上/向下旋转SSC。
--------------------------------------------------------------------
。9Ш38-2 TOB 目标追踪相机
仅黑白,67kg光学目标追踪相机的广角物镜为5°(F = 150mm),窄物镜1.5°(F = 500mm)。
 1. РАБ.РЕЖ. ВКЛ/ВЫКЛ 打开/关闭相机
1. РАБ.РЕЖ. ВКЛ/ВЫКЛ 打开/关闭相机
2. УГОЛ ЗРЕНИЯ ШИРОКИЙ/УЗКИЙ 广角/窄角选择器
------------------------------------------------------------
。CBP、СПК 导弹追踪以及制导系统
。CBP(SVR) 导弹信标跟踪系统(仅接收)
。СПК(SPK) 指令制导系统(仅发送)

 1. ГОТОВ СПК SPK就绪,但未开始传输。
1. ГОТОВ СПК SPK就绪,但未开始传输。
2. ВКЛ ВЫС SPK正在传输制导指令。
3. ЗАХВАТ SVR 系统就绪
4. СХОД 导弹发射
5. SPK正在通过宽波束导弹询问器天线发送信号。
6. SVR收到导弹信标回复,并由圆锥形追踪器在0.8秒内跟踪扫描宽波束导弹跟踪天线。
7. СР.Л,导弹被导弹跟踪(SVR-接收)并引导(SPK-发射)单脉冲中束导弹制导雷达。
8. УЗКИЙЛУЧ,在导弹制导过程中,测量其与目标的相对位置由窄波束单脉冲目标/导弹跟踪雷达(SVR-接收)。在此阶段,制导命令(K1,K2,K3)*仍由单脉冲中束导弹制导雷达(7)。
导弹制导命令:
。K1、K2:导弹转向
。K3:启动无线电近炸引信
-----------------------------------------------------------
。目标的获取
壁虎有以下两种方式可以获取目标:
 9S482机动防空指挥所基于BTR-60装甲人员运输车。 炮塔被替换成伸缩天线(最大高度16m,探测距离为25〜30 km)。在内部增加了一个防空指挥所。
9S482机动防空指挥所基于BTR-60装甲人员运输车。 炮塔被替换成伸缩天线(最大高度16m,探测距离为25〜30 km)。在内部增加了一个防空指挥所。
 1.接收中继自9S482 BTR-60 PU-12的目标坐标
1.接收中继自9S482 BTR-60 PU-12的目标坐标
2.由搭载的SOC雷达进行自主搜索
 1.师一级无线电技术部队发现来袭目标
1.师一级无线电技术部队发现来袭目标
2.目标坐标通过数字数据链传送给9S482 BTR-60 PU-12
3.9S482 BTR-60 PU-12将目标坐标传送给各类前线防空单位(通过语音频道)
。自主搜索目标
 1. ПОИСК ВКЛ 开启SOC天线旋转
1. ПОИСК ВКЛ 开启SOC天线旋转
2. ВЫСОКОЕ ВКЛ 开启SOC发射机
3. I-III ЛУЧ 用目标搜索雷达依次扫描所有三个高度波束
4. ДАЛЬНОСТЬ 按下以将显示的范围选择设置为10-45km
 1.解锁方位角手轮
1.解锁方位角手轮
2. ПОДСВЕТКА 打开方位指示器背景灯
 1.当目标信号接近35公里标记时,选择0-35km范围设置(2)。
1.当目标信号接近35公里标记时,选择0-35km范围设置(2)。
 1.将射程门移至27.5km
1.将射程门移至27.5km
 1.在方向盘(2)上旋转SSC方位线并将其水平移动,直到与目标信号(3)相交。
1.在方向盘(2)上旋转SSC方位线并将其水平移动,直到与目标信号(3)相交。
 1.解锁高度手轮
1.解锁高度手轮
2. ПОДСВЕТКА 打开高度指示器背景灯
3. ЦУ АЗ,选择目标自动搜索模式
 正如我们之前所选择的SOC的扫描仰角I出现了SSC-单脉冲目标/导弹跟踪雷达的锐方向性波束。将仅垂直扫描该高度
正如我们之前所选择的SOC的扫描仰角I出现了SSC-单脉冲目标/导弹跟踪雷达的锐方向性波束。将仅垂直扫描该高度
 1.当目标接近30公里标记时
1.当目标接近30公里标记时
2. ПЕРЕДАТЧИК ВКЛ 打开SSC雷达发射器
 1.当SSC处于目标的方位角和射程门内时,目标将自动被捕获。
1.当SSC处于目标的方位角和射程门内时,目标将自动被捕获。
2. ТСЦ 目标自动搜索已开启
3. 目标信号显示在高度指示器上
 距离指示器有两个波形。上面的波形显示28km范围内的信号(最左端是0km,最右端是28km)。目标(1)以尖刺状显示在上面的波形上。下面的波形展示上面的波形1.5km上的细节部分。
距离指示器有两个波形。上面的波形显示28km范围内的信号(最左端是0km,最右端是28km)。目标(1)以尖刺状显示在上面的波形上。下面的波形展示上面的波形1.5km上的细节部分。
 1. ABTOMAT,自动距离追踪系统指示灯亮起
1. ABTOMAT,自动距离追踪系统指示灯亮起
2.距离指示器正在旋转,显示实际测得的目标距离(〜27,220m)
-----------------------------------------------------------------------
。追踪超低空飞行的目标
由于在非常低的高度上地面杂波非常明显,因此目标的角度只能能被内建相机TOV追踪。在距离上,SSC依旧可以可靠地追踪目标。
 1. НЛЦ,指示灯提示目标对于SSC来说飞行高度过低
1. НЛЦ,指示灯提示目标对于SSC来说飞行高度过低
2. РАБ.РЕЖ. ВКЛ, 打开目标追踪相机
3. РУ,手动追踪模式
注意:手动追踪模式对操作员有更高的技术要求
通过以下操作将目标移动到监视器(6)上的十字线下:
4. АЗИМУТ,SSC的向左/向右慢速旋转
5. УГОЛ МЕСТА, SSC的上/下旋转
6. 当目标移入监视器十字准线时,
7. 按下ПА,使用TOV摄像头系统启动角度跟踪
除了角度跟踪之外,我们还需要知道实际目标距离……
 1,您需要使用距离手轮获取目标信号
1,您需要使用距离手轮获取目标信号
(2)移动到射程门
3, ПОЛУАВТОМАТ,按下按钮以使SSC仅追踪目标距离
------------------------------------------------------------------------
。准备开火
 1. РОД РАБОТЫ - БР 选择实时开火模式(最左)
1. РОД РАБОТЫ - БР 选择实时开火模式(最左)
2. ЗАПРЕТ ПУСКА 插入开火授权密钥
3. 检查可用的导弹。左侧发射器的1-II,2-II,3-II以及右侧发射器的3-I,2-I,1-I
4. ДЦ, 在电压表上监测目标距离。 (10V – 10km)
 1. ВНИМАНИЕ 如果目标将接近射击区域,警告灯在15秒内发出信号。
1. ВНИМАНИЕ 如果目标将接近射击区域,警告灯在15秒内发出信号。
导弹准备(陀螺仪旋转)自动开始。
2. ЗАХВАТ SVR系统就绪,准备接收导弹信标信号。
3. ВКЛ ВЫС,SPK系统正在将导弹制导命令传输给等效系统天线。
 1. ПУСК ГОТОВ, 导弹就绪,随时可以发射
1. ПУСК ГОТОВ, 导弹就绪,随时可以发射
2. ЦЕЛЬ В ЗОНЕ, 目标进入开火区域
---------------------------------------------------------------------------
。开 火!
 1. ЗАПРЕТ ПУСКА, 旋转开火许可钥匙
1. ЗАПРЕТ ПУСКА, 旋转开火许可钥匙
2. ПУСК, 开火
按下发射按钮。启动后,发射命令会自动选择一枚导弹。它的引导方式也会自动根据目标参数进行选择(比SA-2,SA-4高级多了)。同时导弹发射器盖板打开,陀螺仪解锁。
3. СХОД, 导弹发动机开机,发射。
 4. ПУСК ГОТОВ, 当导弹准备就绪灯亮起时我们可以使用ПУСК(2)发射第二枚导弹
4. ПУСК ГОТОВ, 当导弹准备就绪灯亮起时我们可以使用ПУСК(2)发射第二枚导弹

-----------------------------------------------------------------
。检验射击结果
 1.在TOV上,可以看到导弹弹头的爆炸,目标在浓烟中坠落。
1.在TOV上,可以看到导弹弹头的爆炸,目标在浓烟中坠落。

2
.爆炸位置在绘图板上用“ X”标记。 成功命中之后,目标的飞行路径结束。
Enjoy!
-----------------------------------------------------------------------------
没人喜欢吗??那好吧,就此结束了!!
[
本帖最后由 dsy770426 于 2019-10-15 07:58 编辑 ]



